深度学习神经网络特征提取(三)
MobileNet简介
在之前的文章中已经介绍了VGG和ResNet相关的网络结构,随着深度学习的发展,都在追求精度和准确性,因此也导致了网络层数的加深抑或网络的扩展。然而随着网络的不断加深和扩展,参数的数量也在急剧上升,从而导致性能的下降。MobileNet的出现也正是为了解决这种情况。
MobileNetv1
MobileNetv1网络特点主要集中于提出的深度可分离卷积,其网络结构部分只是线性连接,如下图所示。

深度可分离卷积
介绍深度可分离卷积,那我们不得不与常规的卷积进行对比,常规的卷积操作如下图。
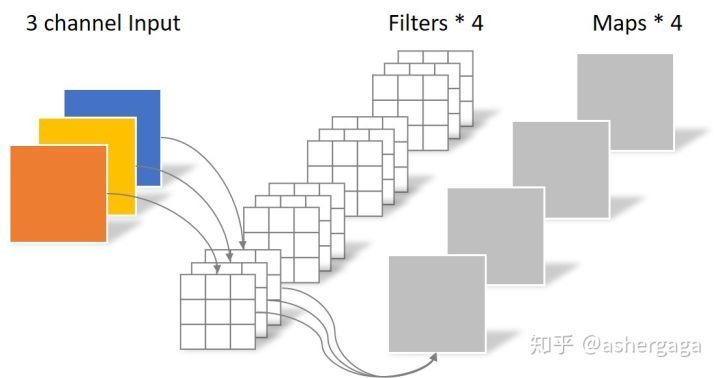
对于一张通道数为3,长宽为5的输入图像,经过3x3的卷积核,且输出层数为4的卷积时,其卷积核的真实情况如上图,在此种情况下参数量为:4x3x3x3=108。
而在深度可分离卷积中,我们进行同样的3x3的卷积核,且输出层数为4的卷积时,其操作情况如下两张图片。
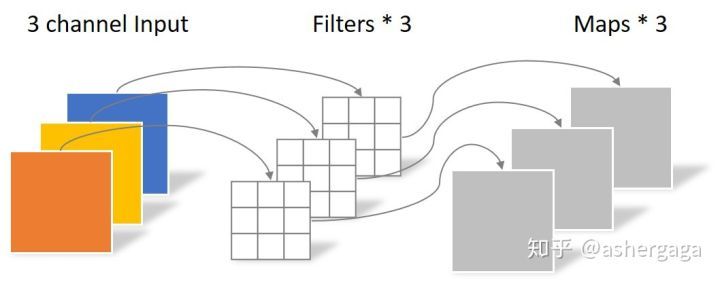
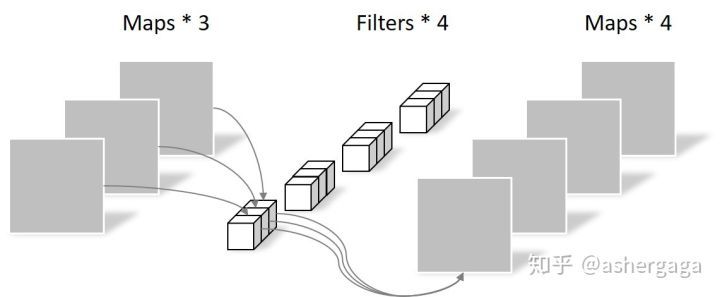
在深度可分离卷积中,首先通过N个3x3的卷积核(其中N为输入的层数,在图一中N为3)与输入层数一一对应进行特征提取,然后再通过M个1xN的卷积进行层数的缩放(图2)。在这种情况下,参数量为:3x3x3+1x1x3x4=39。相较于常规卷积操作,深度可分离卷积的参数量下降了很多,大大提高了模型的运行性能,并且对最终的结果的精确度影响并不是很高。
MobileNetv1的网络结构
在上图中,我们给出了MobileNetv1的网络结构,主要处理流程为:
- (步长为2的卷积和归一化)x 1
- (步长为1的深度可分离卷积和归一化,步长为1的卷积和归一化,步长为2的深度可分离卷积和归一化,步长为1的卷积和归一化)x 3
- (步长为1的深度可分离卷积和归一化,步长为1的卷积和归一化)x 5
- (步长为2的深度可分离卷积和归一化,步长为1的卷积和归一化)x 2
- 一次7x7平均池化,一层全连接层
- 最后softmax层
代码如下:
#-------------------------------------------------------------#
# MobileNet的网络部分
#-------------------------------------------------------------#
def MobileNet(input_shape=[224,224,3], depth_multiplier=1, dropout=1e-3, classes=1000):
img_input = Input(shape=input_shape)
# 224,224,3 -> 112,112,32
x = _conv_block(img_input, 32, strides=(2, 2))
# 112,112,32 -> 112,112,64
x = _depthwise_conv_block(x, 64, depth_multiplier, block_id=1)
# 112,112,64 -> 56,56,128
x = _depthwise_conv_block(x, 128, depth_multiplier, strides=(2, 2), block_id=2)
# 56,56,128 -> 56,56,128
x = _depthwise_conv_block(x, 128, depth_multiplier, block_id=3)
# 56,56,128 -> 28,28,256
x = _depthwise_conv_block(x, 256, depth_multiplier, strides=(2, 2), block_id=4)
# 28,28,256 -> 28,28,256
x = _depthwise_conv_block(x, 256, depth_multiplier, block_id=5)
# 28,28,256 -> 14,14,512
x = _depthwise_conv_block(x, 512, depth_multiplier, strides=(2, 2), block_id=6)
# 14,14,512 -> 14,14,512
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=7)
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=8)
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=9)
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=10)
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=11)
# 14,14,512 -> 7,7,1024
x = _depthwise_conv_block(x, 1024, depth_multiplier, strides=(2, 2), block_id=12)
x = _depthwise_conv_block(x, 1024, depth_multiplier, block_id=13)
# 7,7,1024 -> 1,1,1024
x = GlobalAveragePooling2D()(x)
x = Reshape((1, 1, 1024), name='reshape_1')(x)
x = Dropout(dropout, name='dropout')(x)
x = Conv2D(classes, (1, 1),padding='same', name='conv_preds')(x)
x = Activation('softmax', name='act_softmax')(x)
x = Reshape((classes,), name='reshape_2')(x)
inputs = img_input
model = Model(inputs, x, name='mobilenet_1_0_224_tf')
return model
def _conv_block(inputs, filters, kernel=(3, 3), strides=(1, 1)):
x = Conv2D(filters, kernel, padding='same', use_bias=False, strides=strides, name='conv1')(inputs)
x = BatchNormalization(name='conv1_bn')(x)
return Activation(relu6, name='conv1_relu')(x)
def _depthwise_conv_block(inputs, pointwise_conv_filters, depth_multiplier=1, strides=(1, 1), block_id=1):
x = DepthwiseConv2D((3, 3), padding='same', depth_multiplier=depth_multiplier, strides=strides, use_bias=False, name='conv_dw_%d' % block_id)(inputs)
x = BatchNormalization(name='conv_dw_%d_bn' % block_id)(x)
x = Activation(relu6, name='conv_dw_%d_relu' % block_id)(x)
x = Conv2D(pointwise_conv_filters, (1, 1), padding='same', use_bias=False, strides=(1, 1), name='conv_pw_%d' % block_id)(x)
x = BatchNormalization(name='conv_pw_%d_bn' % block_id)(x)
return Activation(relu6, name='conv_pw_%d_relu' % block_id)(x)
def relu6(x):
return K.relu(x, max_value=6)MobileNetv2
MobileNetv2网络特点相较于MobileNetv1提出了反残差结构和线性瓶颈结构,总体网络结构如下图所示。
反残差结构和线性瓶颈结构
反残差结构是相对于ResNet50而言的,此外MobileNetv2的基础结构和ResNet的基础结构一样,同样是双分支残差连接:
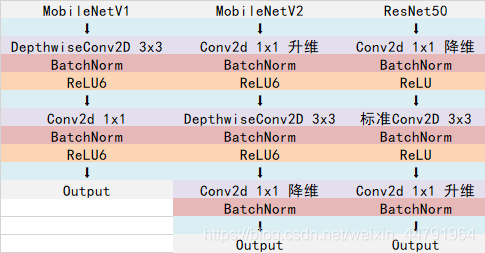
其中ResNet50中先卷积降维,然后进行3x3卷积提取特征,然后在进行升维,这样做在实际中部证明是比直接3x3卷积效果更好的。而在MobileNetv2中,反向进行操作。
而所谓的线性瓶颈结构则是在卷积降维之后不再进行ReLu6层激活,保证提取得到的特征不被破坏,直接与输入相加。
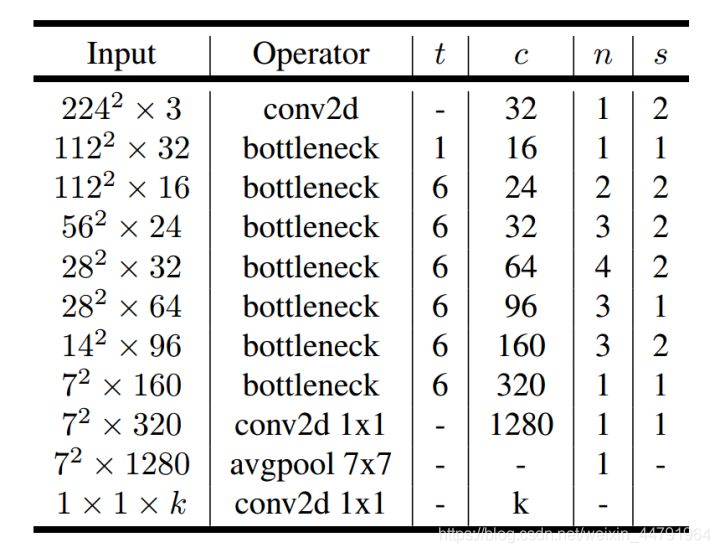
MobileNetv2的网络结构
在上图中,我们给出了MobileNetv2的网络结构,主要处理流程为:
- 步长为2的卷积层 x 1
- 步长为1的瓶颈层 x 1
- 步长为2的瓶颈层 x 3
- 步长为1的瓶颈层 x 1
- 步长为2的瓶颈层 x 1
- 步长为1的瓶颈层 x 1
- 步长为1的卷积层 x 1
- 7x7 平均池化层 x 1
- 全连接层softmax分类
代码如下:
#-------------------------------------------------------------#
# MobileNetV2的网络部分
#-------------------------------------------------------------#
# relu6!
def relu6(x):
return K.relu(x, max_value=6)
def MobileNetV2(input_shape=[224,224,3], classes=1000):
img_input = Input(shape=input_shape)
# 224,224,3 -> 112,112,32
x = ZeroPadding2D(padding=(1, 1), name='Conv1_pad')(img_input)
x = Conv2D(32, kernel_size=3, strides=(2, 2), padding='valid', use_bias=False, name='Conv1')(x)
x = BatchNormalization(epsilon=1e-3, momentum=0.999, name='bn_Conv1')(x)
x = Activation(relu6, name='Conv1_relu')(x)
# 112,112,32 -> 112,112,16
x = _inverted_res_block(x, filters=16, stride=1,expansion=1, block_id=0)
# 112,112,16 -> 56,56,24
x = _inverted_res_block(x, filters=24, stride=2, expansion=6, block_id=1)
x = _inverted_res_block(x, filters=24, stride=1, expansion=6, block_id=2)
# 56,56,24 -> 28,28,32
x = _inverted_res_block(x, filters=32, stride=2, expansion=6, block_id=3)
x = _inverted_res_block(x, filters=32, stride=1, expansion=6, block_id=4)
x = _inverted_res_block(x, filters=32, stride=1, expansion=6, block_id=5)
# 28,28,32 -> 14,14,64
x = _inverted_res_block(x, filters=64, stride=2, expansion=6, block_id=6)
x = _inverted_res_block(x, filters=64, stride=1, expansion=6, block_id=7)
x = _inverted_res_block(x, filters=64, stride=1, expansion=6, block_id=8)
x = _inverted_res_block(x, filters=64, stride=1, expansion=6, block_id=9)
# 14,14,64 -> 14,14,96
x = _inverted_res_block(x, filters=96, stride=1, expansion=6, block_id=10)
x = _inverted_res_block(x, filters=96, stride=1, expansion=6, block_id=11)
x = _inverted_res_block(x, filters=96, stride=1, expansion=6, block_id=12)
# 14,14,96 -> 7,7,160
x = _inverted_res_block(x, filters=160, stride=2, expansion=6, block_id=13)
x = _inverted_res_block(x, filters=160, stride=1, expansion=6, block_id=14)
x = _inverted_res_block(x, filters=160, stride=1, expansion=6, block_id=15)
# 7,7,160 -> 7,7,320
x = _inverted_res_block(x, filters=320, stride=1, expansion=6, block_id=16)
# 7,7,320 -> 7,7,1280
x = Conv2D(1280, kernel_size=1, use_bias=False, name='Conv_1')(x)
x = BatchNormalization(epsilon=1e-3, momentum=0.999, name='Conv_1_bn')(x)
x = Activation(relu6, name='out_relu')(x)
x = GlobalAveragePooling2D()(x)
x = Dense(classes, activation='softmax', use_bias=True, name='Logits')(x)
inputs = img_input
model = Model(inputs, x)
return model
def _inverted_res_block(inputs, expansion, stride, pointwise_filters, block_id):
in_channels = backend.int_shape(inputs)[-1]
x = inputs
prefix = 'block_{}_'.format(block_id)
# part1 数据扩张
if block_id:
# Expand
x = Conv2D(expansion * in_channels, kernel_size=1, padding='same', use_bias=False, activation=None, name=prefix + 'expand')(x)
x = BatchNormalization(epsilon=1e-3, momentum=0.999, name=prefix + 'expand_BN')(x)
x = Activation(relu6, name=prefix + 'expand_relu')(x)
else:
prefix = 'expanded_conv_'
if stride == 2:
x = ZeroPadding2D(padding=(1,1), name=prefix + 'pad')(x)
# part2 可分离卷积
x = DepthwiseConv2D(kernel_size=3, strides=stride, activation=None, use_bias=False, padding='same' if stride == 1 else 'valid', name=prefix + 'depthwise')(x)
x = BatchNormalization(epsilon=1e-3, momentum=0.999, name=prefix + 'depthwise_BN')(x)
x = Activation(relu6, name=prefix + 'depthwise_relu')(x)
# part3压缩特征,而且不使用relu函数,保证特征不被破坏
x = Conv2D(pointwise_filters, kernel_size=1, padding='same', use_bias=False, activation=None, name=prefix + 'project')(x)
x = BatchNormalization(epsilon=1e-3, momentum=0.999, name=prefix + 'project_BN')(x)
if in_channels == pointwise_filters and stride == 1:
return Add(name=prefix + 'add')([inputs, x])
return xMobileNetv3
MobileNetv3网络特点相较于MobileNetv2主要添加了以下特点:
- 轻量级的注意力机制
- 利用h-swish代替swish函数
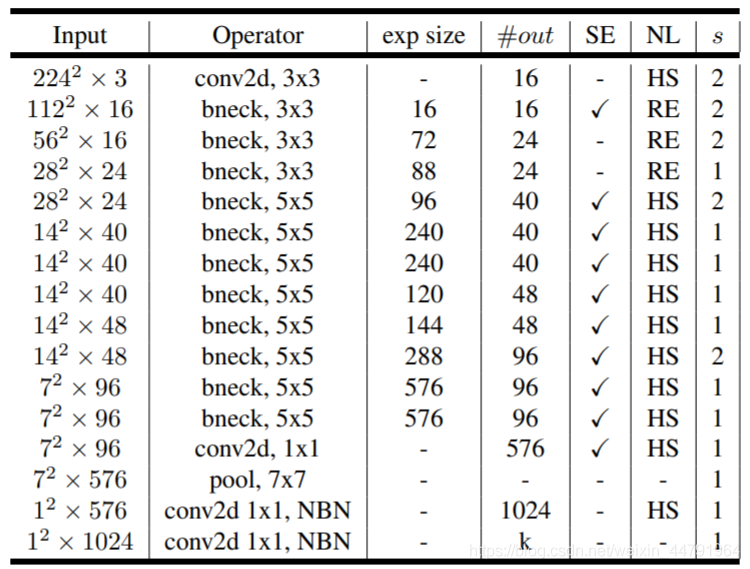
主要网络结构有两种,一种large,一种small,主要区别在于通道数和基础块的次数,本文介绍small类型,网络结构如下:
轻量级注意力机制引入
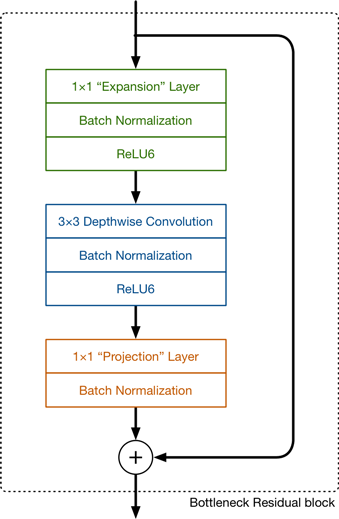
在MobileNetv3中,由于轻量级注意力机制的引入,使得原来的基础块结构产生了一些变化,新的结构如图所示:

从上图我们可以直观的感受到,轻量级注意力机制的引入主要用于改变各个特征层之间的权重系数。
相信通过前面代码的学习你对特征提取的网络已经有了一定的了解,那么下面的代码就很容易理解了。
代码如下:
alpha = 1
def relu6(x):
# relu函数
return K.relu(x, max_value=6.0)
def hard_swish(x):
# 利用relu函数乘上x模拟sigmoid
return x * K.relu(x + 3.0, max_value=6.0) / 6.0
def return_activation(x, nl):
# 用于判断使用哪个激活函数
if nl == 'HS':
x = Activation(hard_swish)(x)
if nl == 'RE':
x = Activation(relu6)(x)
return x
def conv_block(inputs, filters, kernel, strides, nl):
# 一个卷积单元,也就是conv2d + batchnormalization + activation
channel_axis = 1 if K.image_data_format() == 'channels_first' else -1
x = Conv2D(filters, kernel, padding='same', strides=strides)(inputs)
x = BatchNormalization(axis=channel_axis)(x)
return return_activation(x, nl)
def squeeze(inputs):
# 注意力机制单元
input_channels = int(inputs.shape[-1])
x = GlobalAveragePooling2D()(inputs)
x = Dense(int(input_channels/4))(x)
x = Activation(relu6)(x)
x = Dense(input_channels)(x)
x = Activation(hard_swish)(x)
x = Reshape((1, 1, input_channels))(x)
x = Multiply()([inputs, x])
return x
def bottleneck(inputs, filters, kernel, up_dim, stride, sq, nl):
channel_axis = 1 if K.image_data_format() == 'channels_first' else -1
input_shape = K.int_shape(inputs)
tchannel = int(up_dim)
cchannel = int(alpha * filters)
r = stride == 1 and input_shape[3] == filters
# 1x1卷积调整通道数,通道数上升
x = conv_block(inputs, tchannel, (1, 1), (1, 1), nl)
# 进行3x3深度可分离卷积
x = DepthwiseConv2D(kernel, strides=(stride, stride), depth_multiplier=1, padding='same')(x)
x = BatchNormalization(axis=channel_axis)(x)
x = return_activation(x, nl)
# 引入注意力机制
if sq:
x = squeeze(x)
# 下降通道数
x = Conv2D(cchannel, (1, 1), strides=(1, 1), padding='same')(x)
x = BatchNormalization(axis=channel_axis)(x)
if r:
x = Add()([x, inputs])
return x
def MobileNetv3_small(shape = (224,224,3),n_class = 1000):
inputs = Input(shape)
# 224,224,3 -> 112,112,16
x = conv_block(inputs, 16, (3, 3), strides=(2, 2), nl='HS')
# 112,112,16 -> 56,56,16
x = bottleneck(x, 16, (3, 3), up_dim=16, stride=2, sq=True, nl='RE')
# 56,56,16 -> 28,28,24
x = bottleneck(x, 24, (3, 3), up_dim=72, stride=2, sq=False, nl='RE')
x = bottleneck(x, 24, (3, 3), up_dim=88, stride=1, sq=False, nl='RE')
# 28,28,24 -> 14,14,40
x = bottleneck(x, 40, (5, 5), up_dim=96, stride=2, sq=True, nl='HS')
x = bottleneck(x, 40, (5, 5), up_dim=240, stride=1, sq=True, nl='HS')
x = bottleneck(x, 40, (5, 5), up_dim=240, stride=1, sq=True, nl='HS')
# 14,14,40 -> 14,14,48
x = bottleneck(x, 48, (5, 5), up_dim=120, stride=1, sq=True, nl='HS')
x = bottleneck(x, 48, (5, 5), up_dim=144, stride=1, sq=True, nl='HS')
# 14,14,48 -> 7,7,96
x = bottleneck(x, 96, (5, 5), up_dim=288, stride=2, sq=True, nl='HS')
x = bottleneck(x, 96, (5, 5), up_dim=576, stride=1, sq=True, nl='HS')
x = bottleneck(x, 96, (5, 5), up_dim=576, stride=1, sq=True, nl='HS')
x = conv_block(x, 576, (1, 1), strides=(1, 1), nl='HS')
x = GlobalAveragePooling2D()(x)
x = Reshape((1, 1, 576))(x)
x = Conv2D(1024, (1, 1), padding='same')(x)
x = return_activation(x, 'HS')
x = Conv2D(n_class, (1, 1), padding='same', activation='softmax')(x)
x = Reshape((n_class,))(x)
model = Model(inputs, x)
return model


