深度学习之语义分割DeepLabV3+(2018)
DeepLabV3+网络简介
在传统领域的语义分割中,从FCN开始提出的全卷积网络,到DeepLabv3+网络的提出,基本上语义分割领域中大部分的问题都可以得到解决。在此之后的语义分割领域中出现的文章大部分都是结合了注意力机制提出来的,本文针对传统语义分割的发展过程的新高峰——DeepLabV3+进行介绍,针对其本身的优点进行说明。
首先我们来看一下DeepLabv3+所作出的优化:
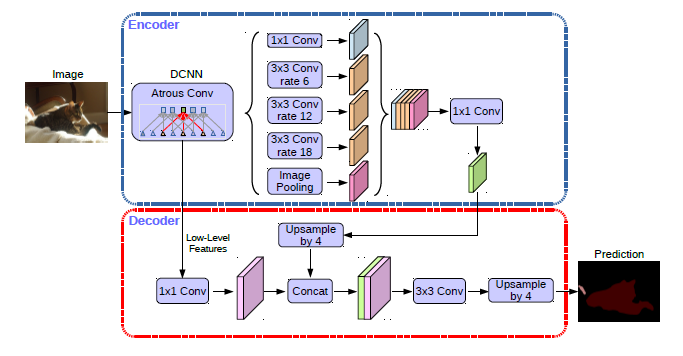
DeepLabv3+是在DeepLabv3的编码与解码的基础上,应用了DeepLabv3的编码结构,在解码部分进行了改进DeepLabv3+使用了空洞卷积进行特征提取,能够随意控制特征的提取的分辨率DeepLabv3+使用了Xception作为主干特征提取网络,采用深度可分离卷积和ASPP模块
通过DeepLabv3+论文中的阐述,我们可以大致了解整个DeepLabv3+的网络结构,如下图:
Xception网络优化
DeepLabv3+采用了Xception作为主干特征提取的网络,并对其进行了优化改进,改进主要包括两个方面:
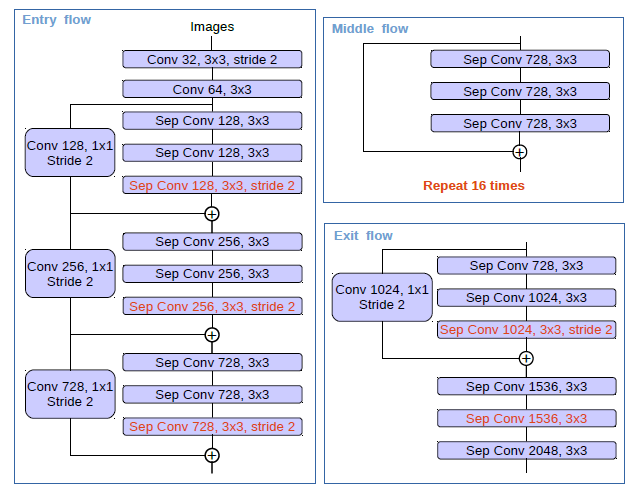
DeepLabv3+在Xception中引入了空洞卷积DeepLabv3+对Xception的基础块进行了增加,中间块从原来的8次重复加深变成16次重复加深
具体改进后的网络如下图所示:
代码展示如下:
class DepthwiseSeparabel(nn.Module):
def __init__(self,input_channel,output,stride=1, dilation = 1,kernel_size = 1, padding = 0, activate_first = False):
super(DepthwiseSeparabel,self).__init__()
self.relu0 = nn.ReLU(inplace=True)
self.depth_wise = nn.Conv2d(input_channel,input_channel,kernel_size=kernel_size, stride = stride, padding =padding,dilation =dilation, groups = input_channel,bias =False)
self.batch1 = nn.BatchNorm2d(input_channel)
self.relu1 = nn.ReLU(inplace=True)
self.separable = nn.Conv2d(input_channel,output,kernel_size=1,stride = 1,bias =False)
self.batch2 = nn.BatchNorm2d(output)
self.relu2 = nn.ReLU(inplace=True)
self.activate_first = activate_first
def forward(self,x):
if self.activate_first:
x = self.relu0(x)
x = self.depth_wise(x)
x = self.batch1(x)
if not self.activate_first:
x = self.relu1(x)
x = self.separable(x)
x = self.batch2(x)
if not self.activate_first:
x = self.relu2(x)
return x
class Xception_Entry_flow(nn.Module):
def __init__(self,input_channel,output_channel,stride=1):
super(Xception_Entry_flow,self).__init__()
self.shortcut = nn.Conv2d(input_channel,output_channel,1,stride=stride, bias=False)
self.shortcutbn = nn.BatchNorm2d(output_channel)
self.hook_layer = None
self.sepconv1 = DepthwiseSeparabel(input_channel,output_channel,kernel_size = 3,stride=1,padding=1,dilation=1,activate_first=True)
self.sepconv2 = DepthwiseSeparabel(output_channel,output_channel,kernel_size = 3,stride=1,padding=1,dilation=1,activate_first=True)
self.sepconv3 = DepthwiseSeparabel(output_channel,output_channel,kernel_size = 3,stride=stride,padding=1,dilation=1,activate_first=True)
def forward(self,x):
shortcut = self.shortcut(x)
shortcut = self.shortcutbn(shortcut)
x = self.sepconv1(x)
x = self.sepconv2(x)
self.hook_layer = x
x = self.sepconv3(x)
x+=shortcut
return xclass Xception_Middle_flow(nn.Module):
def __init__(self,input_channel,atrous):
super(Xception_Middle_flow,self).__init__()
self.sepconv1 = DepthwiseSeparabel(input_channel,input_channel,kernel_size =3,stride=1,padding=atrous,dilation=atrous,activate_first=True)
self.sepconv2 = DepthwiseSeparabel(input_channel,input_channel,kernel_size =3,stride=1,padding=atrous,dilation=atrous,activate_first=True)
self.sepconv3 = DepthwiseSeparabel(input_channel,input_channel,kernel_size =3,stride=1,padding=atrous,dilation=atrous,activate_first=True)
def forward(self,x):
skip = x
x = self.sepconv1(x)
x = self.sepconv2(x)
x = self.sepconv3(x)
x+=skip
return xclass Xception_Exit_flow(nn.Module):
def __init__(self,in_filters,out_filters,strides=1,atrous=1):
super(Xception_Exit_flow,self).__init__()
self.shortcut = nn.Conv2d(in_filters,out_filters,1,stride=strides, bias=False)
self.shortcutbn = nn.BatchNorm2d(out_filters)
self.hook_layer = None
self.sepconv1 = DepthwiseSeparabel(in_filters,in_filters,kernel_size =3,stride=1,padding=atrous,dilation=atrous,activate_first=True)
self.sepconv2 = DepthwiseSeparabel(in_filters,out_filters,kernel_size =3,stride=1,padding=atrous,dilation=atrous,activate_first=True)
self.sepconv3 = DepthwiseSeparabel(out_filters,out_filters,kernel_size =3,stride=1,padding=atrous,dilation=atrous,activate_first=True)
def forward(self,x):
shortcut = self.shortcut(x)
shortcut = self.shortcutbn(shortcut)
x = self.sepconv1(x)
x = self.sepconv2(x)
self.hook_layer = x
x = self.sepconv3(x)
x+=shortcut
return xclass Xception(nn.Module):
def __init__(self,os):
super(Xception,self).__init__()
if os == 8:
stride_list = [2,1,1]
elif os == 16:
stride_list = [2,2,1]
# input shape = 512,512,3
self.first_block = nn.Sequential(
nn.Conv2d(3,32,kernel_size=3,stride=2, padding = 1, bias=False),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
nn.Conv2d(32,64,kernel_size=3,stride=1,padding=1,bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True)
)
self.Entry_flow0 = Xception_Entry_flow(64,128,2)
self.Entry_flow1 = Xception_Entry_flow(128,256,stride_list[0])
self.Entry_flow2 = Xception_Entry_flow(256,728,stride_list[1])
rate = 16//os
self.Middle_flow = nn.Sequential(
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate),
Xception_Middle_flow(728,atrous = rate)
)
self.Exit_flow = Xception_Exit_flow(728,1024,stride_list[2],atrous=rate)
self.conv0 = DepthwiseSeparabel(1024,1536,kernel_size = 3,stride = 1,padding = rate,dilation=rate,activate_first=False)
self.batch0 = nn.BatchNorm2d(1536)
self.relu0 = nn.ReLU(inplace=True)
self.conv1 = DepthwiseSeparabel(1536,1536,kernel_size = 3,stride = 1,padding = rate,dilation=rate,activate_first=False)
self.batch1 = nn.BatchNorm2d(1536)
self.relu1 = nn.ReLU(inplace=True)
self.conv2 = DepthwiseSeparabel(1536,2048,kernel_size = 3,stride = 1,padding = rate,dilation=rate,activate_first=False)
self.batch2 = nn.BatchNorm2d(2048)
self.relu2 = nn.ReLU(inplace=True)
def forward(self,x):
x = self.first_block(x)
x = self.Entry_flow0(x)
x = self.Entry_flow1(x)
x = self.Entry_flow2(x)
skip = self.Entry_flow1.hook_layer
x = self.Middle_flow(x)
x = self.Exit_flow(x)
x = self.conv0(x)
x = self.batch0(x)
x = self.relu0(x)
x = self.conv1(x)
x = self.batch1(x)
x = self.relu1(x)
x = self.conv2(x)
x = self.batch2(x)
x = self.relu2(x)
return x,skip以上就是DeepLabv3+针对Xception作出的所有改进,主干网络输出为一个4倍下采样的特征和最后的特征层,接着后面就是DeepLabv3+的解码部分
DeepLabV3解码部分
DeepLabv3+的解码部分主要就是将主干网络输出的两个特征层进行处理,对4倍下采样的特征进行通道调整,最后的特征层进行ASPP模块处理以及上采样,然后将两个特征层进行融合后再进行上采样,具体代码如下:
class ASPP(nn.Module):
def __init__(self,input_channel,output_channel,atrous_rate):
super(ASPP,self).__init__()
self.avg = nn.AdaptiveAvgPool2d(1)
self.conv0 = nn.Conv2d(input_channel,output_channel,kernel_size=1,stride=1,bias=False)
self.batch0 = nn.BatchNorm2d(output_channel)
self.relu0 = nn.ReLU(inplace=True)
# resize the globalFeature
self.branch1 = nn.Sequential(
nn.Conv2d(input_channel,output_channel,kernel_size=1,stride=1,bias =False),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace=True)
)
self.branch2 = nn.Sequential(
nn.Conv2d(input_channel, output_channel,kernel_size = 3, stride=1, padding=atrous_rate[0], dilation=atrous_rate[0],bias=False),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace=True),
)
self.branch3 = nn.Sequential(
nn.Conv2d(input_channel, output_channel,kernel_size = 3, stride=1, padding=atrous_rate[1], dilation=atrous_rate[1],bias=False),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace=True),
)
self.branch4 = nn.Sequential(
nn.Conv2d(input_channel, output_channel,kernel_size = 3, stride=1, padding=atrous_rate[2], dilation=atrous_rate[2],bias=False),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace=True),
)
self.conv1 = nn.Conv2d(output_channel*5, output_channel,kernel_size=1,stride=1)
self.batch1 = nn.BatchNorm2d(output_channel)
self.relu1 = nn.ReLU(inplace=True)
def forward(self,x):
[b,c,h,w] = x.size()
global_features = self.avg(x)
global_features = self.conv0(global_features)
global_features = self.batch0(global_features)
global_features = self.relu0(global_features)
global_features = F.interpolate(global_features,(h,w),None,'bilinear',True)
p1 = self.branch1(x)
p2 = self.branch2(x)
p3 = self.branch3(x)
p4 = self.branch4(x)
x = torch.cat([global_features,p1,p2,p3,p4],dim=1)
x = self.conv1(x)
x = self.batch1(x)
x = self.relu1(x)
return xclass Deeplabv3plus(nn.Module):
def __init__(self,os,num_classes):
super(Deeplabv3plus,self).__init__()
if os == 16:
atrous_rate = [6,12,18]
else:
atrous_rate = [12,24,36]
self.Xception = Xception(os)
self.aspp = ASPP(2048,256,atrous_rate)
self.dropout0 = nn.Dropout(0.5)
self.upsample0 = nn.UpsamplingBilinear2d(scale_factor=4)
self.conv0 = nn.Conv2d(256,48,kernel_size=1,stride=1,padding = 0,bias=False)
self.batch0 = nn.BatchNorm2d(48)
self.relu0 = nn.ReLU(inplace=True)
self.conv1 = nn.Conv2d(256+48,256,kernel_size=3,stride=1,padding=1,bias=False)
self.batch1 = nn.BatchNorm2d(256)
self.relu1 = nn.ReLU(inplace=True)
self.dropout1 = nn.Dropout(0.5)
self.conv2 = nn.Conv2d(256,256,kernel_size=3,stride=1,padding=1,bias=False)
self.batch2 = nn.BatchNorm2d(256)
self.relu2 = nn.ReLU(inplace=True)
self.dropout2 = nn.Dropout(0.1)
self.last_conv = nn.Conv2d(256,num_classes,kernel_size=1,stride=1,padding=0,bias=False)
self.upsample1 = nn.UpsamplingBilinear2d(scale_factor=4)
def forward(self,x):
x,skip = self.Xception(x)
x = self.aspp(x)
x = self.dropout0(x)
x = self.upsample0(x)
# 处理skip
skip = self.conv0(skip)
skip = self.batch0(skip)
skip = self.relu0(skip)
x = torch.cat([x,skip],dim=1)
x = self.conv1(x)
x = self.batch1(x)
x = self.relu1(x)
x = self.dropout1(x)
x = self.conv2(x)
x = self.batch2(x)
x = self.relu2(x)
x = self.dropout2(x)
x = self.last_conv(x)
x = self.upsample1(x)
return x
至此关于DeepLabv3+的主要代码全部给出,至于其他的学习的超参数需要读者自行调整。



