JSIS3D 论文学习记录
论文地址:
环境准备
- CUDA 10
- Python 3.5+
- Pytorch 0.4.0+
Installation
首先需要编译MV-CRF,在下载的文件根目录中运行一下命令:
cd external/densecrf
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release ..
make
cd ../../.. # You should be at the root folder here
makeDataset
- 如果想自己准备数据集:
- 数据集准备,JSIS3D论文使用的是开源的S3DIS数据集,所以需要下载
S3DIS数据集,这个数据集下载之后大约4个G,解压之后16G。 - 在
data/s3dis文件夹下创建raw和processed两个空文件夹用于存放原始数据和处理的过程数据 - 创建完
raw和processed两个空文件夹之后,将我们下载的S3DIS数据集解压之后放入raw文件夹下 - 进入根目录下的
script文件夹中,里面包含四个py文件,先运行collect_annotations.py文件,之后再运行prepare_h5.py - 运行
prepare_h5.py文件时,首先需要修改文件中91行的代码,将其中num_points改成4096,这是根据pointnet作者代码设置的参数进行设置的 - 运行完
prepare_h5.py文件之后,接着运行estimate_mean_size.py和estimate_median_freq.py文件,数据集这样就制作完毕了。
- 如果想使用作者提供的数据集:
- 作者提供了已经处理好的
S3DIS数据集,文件地址 - 下载了作者的数据集之后,将解压后的数据集放入
data/s3dis/h5即可
Training & Evaluation
准备数据集之后,开始训练数据:
python train.py --config configs/s3dis.json --logdir logs/s3dis数据训练完成之后,模型相关的数据将会放在logs/s3dis文件夹下。
运行训练完的模型进行预测:
python pred.py --logdir logs/s3dis --mvcrf预测代码运行之后,会在logs/s3dis文件夹下生成pred.npz文件,之后想要对预测的结果进行可视化以及评价精度,运行以下代码:
python eval.py --logdir logs/s3dis --visualize运行完以上代码之后,将会在logs/s3dis文件夹中,生成ply文件,运用相关程序打开ply文件可以,发现里面有各个点运行的class和label信息。本文结合open3d和plyfile两个python库,对ply文件进行了处理与可视化,代码如下:
import open3d as o3d
import numpy as np
from plyfile import PlyData, PlyElement
plydata = PlyData.read(
r'F:\python_work\open3d_work\Area_5_conferenceRoom_1.ply')
pc = plydata['vertex'].data
pcd_array = []
for i in range(pc.size):
pcd_array.append(list(pc[i]))
pcd_array = np.array(pcd_array)
colors=pcd_array[:, 3:6]
class_label = pcd_array[:, 6]
t=class_label.tolist()
s=set(t)
class_label_pro = list(s)
colors_list=[[152, 0, 0],[255, 0, 0],[255, 153, 0],[255, 255, 0],[0, 255, 0],[0, 255, 255],[74, 134, 232],[0, 0, 255],[255, 0, 255],[230, 184, 175],[252, 229, 205],[208, 224, 227],[221, 126, 107]]
for i in range(class_label.size):
colors[i]=colors_list[class_label_pro.index(class_label[i])]
pointcloud = o3d.geometry.PointCloud()
pointcloud.points = o3d.utility.Vector3dVector(pcd_array[:, 0:3])
pointcloud.colors = o3d.utility.Vector3dVector(colors/255)
o3d.io.write_point_cloud("copy_of_fragment.pcd", pointcloud)
o3d.visualization.draw_geometries([pointcloud])
print('ok')针对以上代码可以在理解的基础上进行修改。结果图展示:
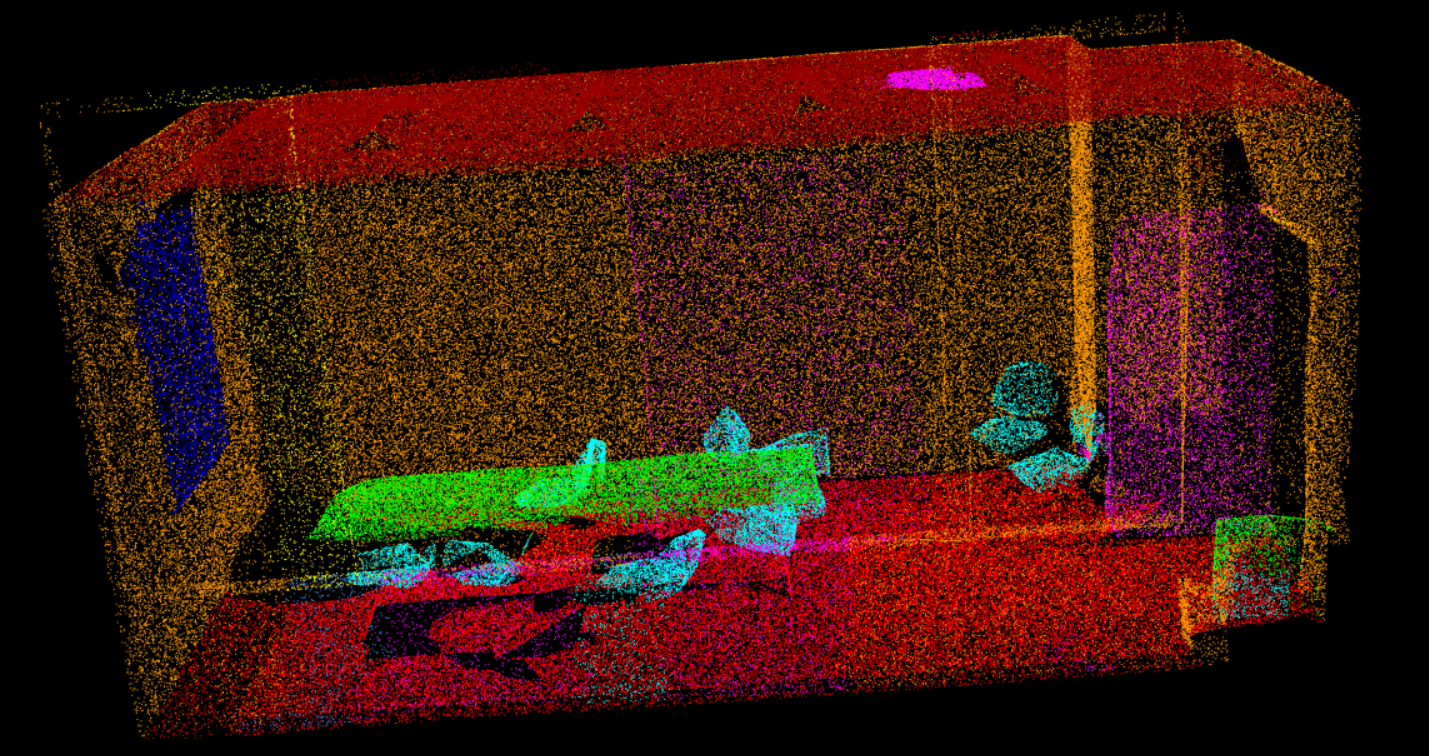
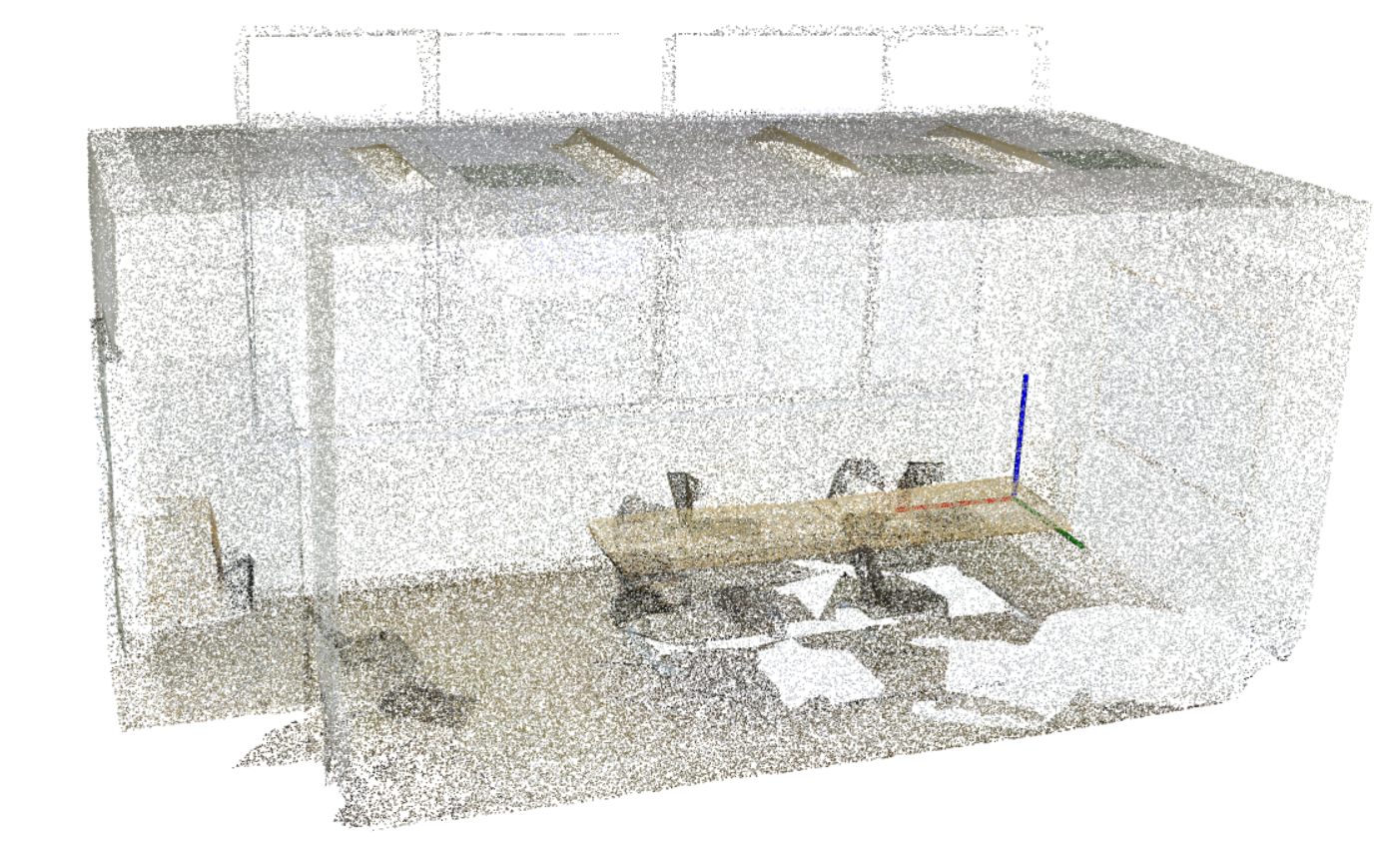
注意:论文中针对S3DIS数据集,以区域1,2,3,4,6作为训练集,区域5作为测试集



